- Published on
콘크리트 균열 분석 B-COSFIRE(MATLAB)
- Authors

- Name
- eunchurn
- @eunchurn
콘크리트 균열을 탐지 하는 방법론은 여러가지가 있다. 특히 직접 이미지프로세싱을 통한 직접 추출하는 방식이 일반적이다. 그러나 알고리즘의 수행 능력은 둘째 치더라도 수행 성능은 담보하기 어렵다. B-COSFIRE 필터는 의료 영상에서 혈관을 탐색하는 알고리즘에서 착안한다. 특히 선구조를 식별하는 알고리즘으로써 균열에도 적용이 충분히 가능할꺼라는 시도로 몇몇 엔지니어가 최근 제시하였다. 이 연구자는 MATLAB 소스파일을 공개하였다. Trainable COSFIRE filters for curvilinear structure delineation in images 또한 Gitlab Repository 에도 계속 업데이트 하고 있다. 자세하게 서술된 학술지 저널까지 공개되어 있다. Azzopardi, G., Strisciuglio, N., Vento, M., Petkov, N.: Trainable COSFIRE filters for vessel delineation with application to retinal images. Medical Image Analysis 19(1), 46 - 57, 2015 예제는 3가지로 소개되어 있다.
ExampleBloodVesselSegmentation.m: 라인 검출기와 라인-엣지 검출기의 구성 및 망막 이미지에서의 혈관 분할에 대한 예제 코드. 최종 응답은 두 필터의 응답 합계로 응용한다.PavementCrackDelineation.m(CAIP 2017) : CAIP17에서 제시된 도로 포장 이미지의 균열 감지를 위한 이미지 프로세싱 파이프 라인에 B-COSFIRE 필터 적용. 이 코드는 논문에서 보고 된 벤치 마크 결과를 제공한다. Azzopardi, G. Petkov, N. "Detection of Curved Lines with B-COSFIRE Filters: A Case Study on Crack Delineation", IWOBI 2017INRIAImages.m(IWOBI 2017) : B-COSFIRE 필터를 사용하여 이미지의 가늘고 긴 선형구조를 감지한다. 이 코드는 종이에 사용 된 INRIA 데이터의 이미지에 대한 벤치 마크 결과를 제공한다
저자는 소스를 공개하며 다음과 같이 소개하였다.
B-COSFIRE filters are non-linear trainable filters for detection of elongated patterns in images. This is the code of the trainable non-linear B-COSFIRE filters for delineation of elongated patterns in images.
하지만 학습이라기 보다는 파라미터 최적화를 통해 특정 도로에 적합하도록 개선하는 정도이다. 또한 미세균열을 찾기 위한 작업에서 고해상도 이미지를 한번에 처리하기엔 성능면에서 큰 효과를 거두지 못할 것 같다.
그러나 추후 딥러닝을 위한 ground truth 자료를 충분히 확보하기 위해 본 알고리즘을 써보는 것은 나쁘지 않을 것 같다. 딥러닝에서는 실측자료를 얼마나 많이 얻었냐에 따라 그 성능이 많이 달라지기 때문에 GT작업이 매우 중요하다. 모두 사람의 노동력을 빌릴 수 없기 때문에 최초로 걸러내는 작업에서 B-COSFIRE 알고리즘을 사용하는 방법은 나쁘지 않을 것 같다. 따라서 GT작업을 위한 프로그램을 개발해보았다. MATLAB이지만 MATLAB이 없어도 GUI로 빌드하여 MCR(MATLAB Runtime Compiler)를 통해 배포가 가능하다.
개발자의 논문에 서술된 B-COSFIRE 방법론에 대하여 간략히 소개하고 프로그램 사용법을 기술하였다. 근무하던 회사와 연관되어 있어 소스는 공개가 불가능하다. 하지만 위의 Gitlab Repository에서 응용하여 관심있는 사람이라면 쉽게 개발이 가능할 것이다.
B-COSFIRE 방법론
논문에서는 다른 균열 분석 알고리즘과 벤치마크를 수행하였다. 그러나 앞서 이야기한 것처럼 딥러닝을 위한 중간과정으로 채택하였기 때문에 알고리즘의 워크플로는 다음과 같다.
- B-COSFIRE filtering
- binarization with nonmaximum suppression
- hysteresis thresholding (최적화 및 벤치마크를 위함)
- minimum enclosing rectangle
- making ground truth
Configure of a B-COSFIRE filter
B-COSFIRE 필터는 Gaussian 함수의 그룹 로부터 입력을 받으며 외부 Gaussian 함수는 표준 편차 를 가진다.
Petkov와 Vosser(Petkov & Visser, 2005)에서, 위의 함수에 대해 0.96 의 반경 또는 1.92 의 너비를 가진 라인에 대해 최대 응답이 추출 되었음이 나타났다. 이 결과를 바탕으로 외부 표준 편차 를 설정한다. 여기서 는 관심있는 선의 너비이다.
B-COSFIRE 필터의 구조, 즉 우리가 DoG 응답을 고려하는 위치는 주어진 프로토타입 패턴에 대한 자동 구성 프로세스에서 결정된다. 구성에 대한 자세한 내용은 Azzopardi et al.의 논문(Azzopardi et al., 2015)을 참조바람. 우리는 너비 , 길이 및 방향 의 프로토타입 선 구조에 B-COSFIRE 필터를 구성한다. 구성 결과는 다음과 같이 설정된다. :
여기서 와 with . 은 선의 기본 방향이다. 집합에서 두개의 튜플은 B-COSFIRE 필터의 지지점에 대한 위치 (거리 및 극각)를 나타내며 center-on Gaussians (DoG) 필터의 응답을 나타낸다. 파라미터 는 고려 된 DoG 응답 사이의 픽셀 간격을 나타낸다. 일때 우리는 원하는 너비 , 길이 , 그리고 방향 , 그리고 일때 (가능한 최대 값) 결과 필터는 세 개의 튜플로만 구성된다: 중앙에서 DoG 응답을 참조하는 튜플 및 두 개의 튜플 및 는 B-COSFIRE 필터의 선택도는 지지체의 양쪽면에서 가장 먼 거리를 가리키는 값이다.
Response of a B-COSFIRE filter
B-COSFIRE 필터 의 응답은 filter-blur-shift-combine의 네 단계로 계산된다. 첫 번째 단계에서는 입력 이미지 를 DoG 커널 로 filter하고 로 결과 이미지를 나타낸다:
여기서 연산자 는 반파 정류를 나타내며 최근 정류 선형 유닛 (ReLU)으로 알려져 있다.
인공 신경망의 맥락에서, 정류기는 인수의 양의 부분으로 정의된 활성화 함수이다. 여기서 는 뉴런에 대한 입력이다. 이 함수는 램프(ramp) 기능으로도 알려져 있으며 전기 공학의 반 파장 정류와 유사하다. 이 활성화 함수는 처음 Hahnloser R. H. et al.에 의해 강한 생물학적 동기와 수학적 정당성을 지닌 저널 Nature지의 2000년 논문 Hahnloser et al. (2000) 에서 소개되었다. 이 함수는 널리 사용되는 로지스틱 시그모이드(확률론에 의해 영감을 얻은 것; 로지스틱 회귀분석 참조)보다 효과적으로 Convolution 네트워크(Azzopardi & Azzopardi, 2013)에 사용되게 되었다. 또한 (Azzopardi et al., 2015) 대응안인 쌍곡선 탄젠트(hyperbolic tangent) 보다 실용적이다. 2017년에 들어서 현재 이 정류기는 딥 뉴럴 네트워크에서 가장 널리 알려진 활성화 함수이다. (Bibiloni et al., 2016; Chai et al., 2013)
그후 선호하는 위치와 관련하여 약간의 tolerance를 허용하기 위해 가중치가 최대인 비선형 blurring 연산으로 DoG 응답을 blur 처리한다. 가중치는 표준 편차 ' 가 B-COSFIRE 필터의 지원 센터로부터의 거리가 증가함에 따라 선형적으로 증가하는 가우시안 함수에 의해 주어진다 : ''. ' 와 값은 파라미터이며, 프로토타입 형태에서 변형에 대한 tolerance를 정규화한다.
세 번째 단계에서는 벡터 에 의해 번째 blur 처리한 DoG 응답을 shift 변환한다. 이러한 방식으로 모든 관련 DoG 응답은 관련 위치, 즉 관련 B-COSFIRE 필터의 지지점에서 연결된다. 번째 튜플의 위치에서 blur처리되고 shift 된 DoG 응답 은:
여기서 이고, 이다. 마지막 단계에서 B-COSFIRE필터의 응답 ,의 기하평균은 다음과 같다.
논문에서 방법론 제시 이후의 작업은 타 알고리즘과 비교하기 위한 벤치마크를 수행하는 결과를 나타낸다. 나는 조금 다른 방식으로 이진화(binarization)을 수행했으며, 균열을 분류하기 위한 MER(Minimum enclosing rectangle)작업을 수행하였다. 이 방법은 직관적인 방법론이라서 이미지 프로세싱에 관심이 있다면, DoG 응답을 가지고 충분히 다른 여러방법으로도 추출해 낼 수 있다.
Binarization
이진화 방법은 1차적으로 binarize()함수로 수행되며 2차적으로 pixel 연결성을 찾아 쓰레숄딩 한다. 이것은 MATLAB Image Processing Toolbox에 있는 bwconncomp() 함수를 사용한다. binarize()함수는 아래와 같다.
function [binarymap] = binarize(rotoutput1, highthresh)
orienslist = 0:pi/12:pi-pi/12;
[viewResult, oriensMatrix] = calc_viewimage(rotoutput1,...
1:numel(orienslist), orienslist);
thinning = calc_thinning(viewResult, oriensMatrix, 1);
binarymap = calc_hysteresis(thinning, 1,...
0.5*highthresh*max(thinning(:)), highthresh*max(thinning(:)));
end
2차 연결픽셀의 쓰레숄딩하는 방법은 아래와 같다. 연결 픽셀 수 ccthreshold값을 지정해 주어야 한다.
cc = bwconncomp(binImg, 4);
nograin=cellfun('length',cc.PixelIdxList);
[val,id]=sort(nograin,'descend');
ite = find(val>ccthreshold,1,'last'); % thresholding cc
Minimum Enclosing Rectangle
MER 알고리즘은 minBoundingBox()을 응용하였다.
function bb = minEnclosingRectangle(X)
k = convhull(X(1,:),X(2,:));
CH = X(:,k);
E = diff(CH,1,2);
T = atan2(E(2,:),E(1,:));
T = unique(mod(T,pi/2));
R = cos( reshape(repmat(T,2,2),2*length(T),2) ...
+ repmat([0 -pi ; pi 0]/2,length(T),1));
RCH = R*CH;
bsize = max(RCH,[],2) - min(RCH,[],2);
area = prod(reshape(bsize,2,length(bsize)/2));
[a,i] = min(area);
Rf = R(2*i+[-1 0],:);
bound = Rf * CH;
bmin = min(bound,[],2);
bmax = max(bound,[],2);
Rf = Rf';
bb(:,4) = bmax(1)*Rf(:,1) + bmin(2)*Rf(:,2);
bb(:,1) = bmin(1)*Rf(:,1) + bmin(2)*Rf(:,2);
bb(:,2) = bmin(1)*Rf(:,1) + bmax(2)*Rf(:,2);
bb(:,3) = bmax(1)*Rf(:,1) + bmax(2)*Rf(:,2);
프로그램 UI
Usages
- 실행화면
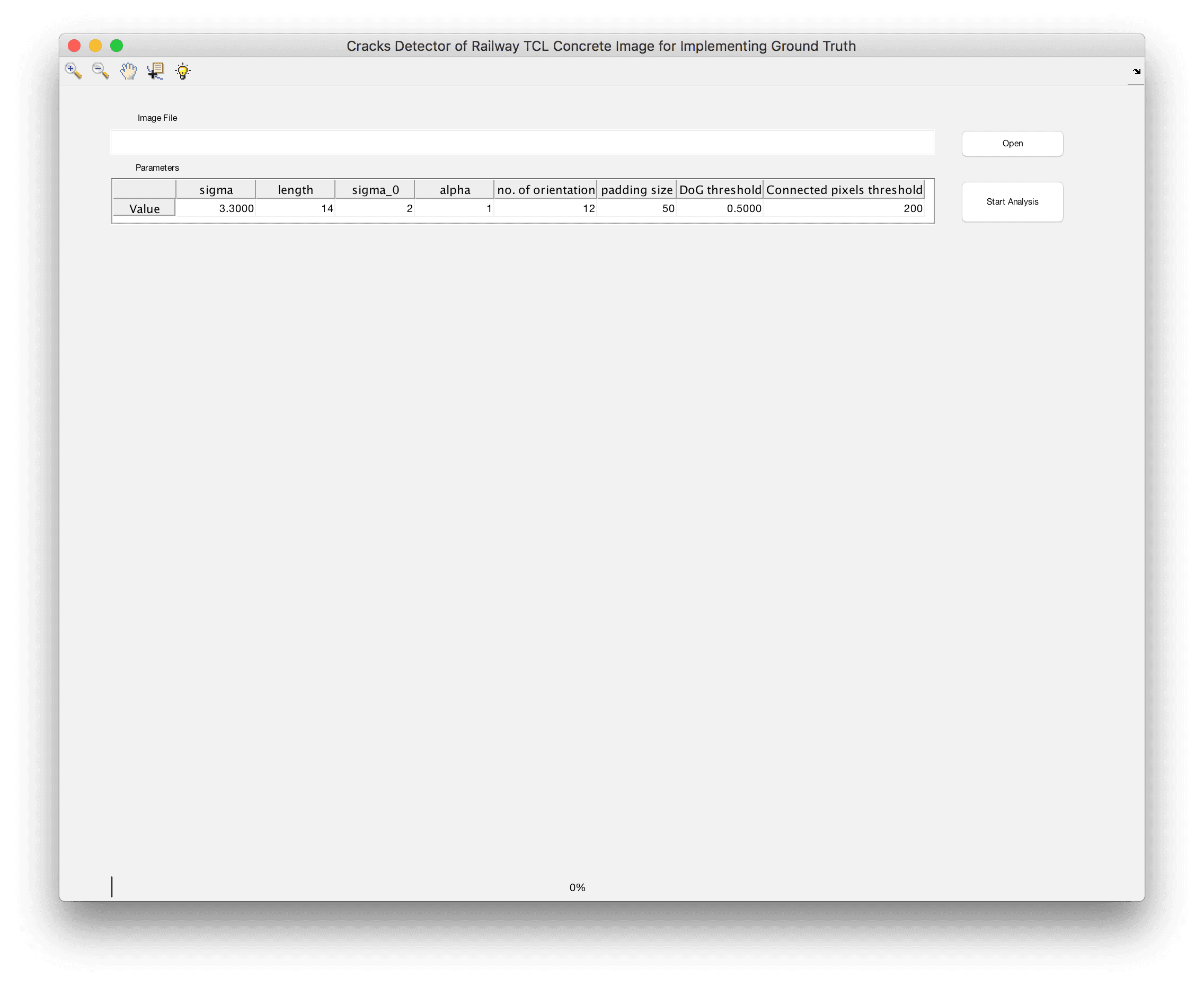
- Image File Open : 이미지 열기 Open 버튼을 클릭하면 다음과 같은 파일탐색창이 나온다. 균열 이미지 파일을 선택한 후 열기를 선택한다.
- 이미지 로딩 : 아래 그림과 같이 이미지 파일을 불러온다.
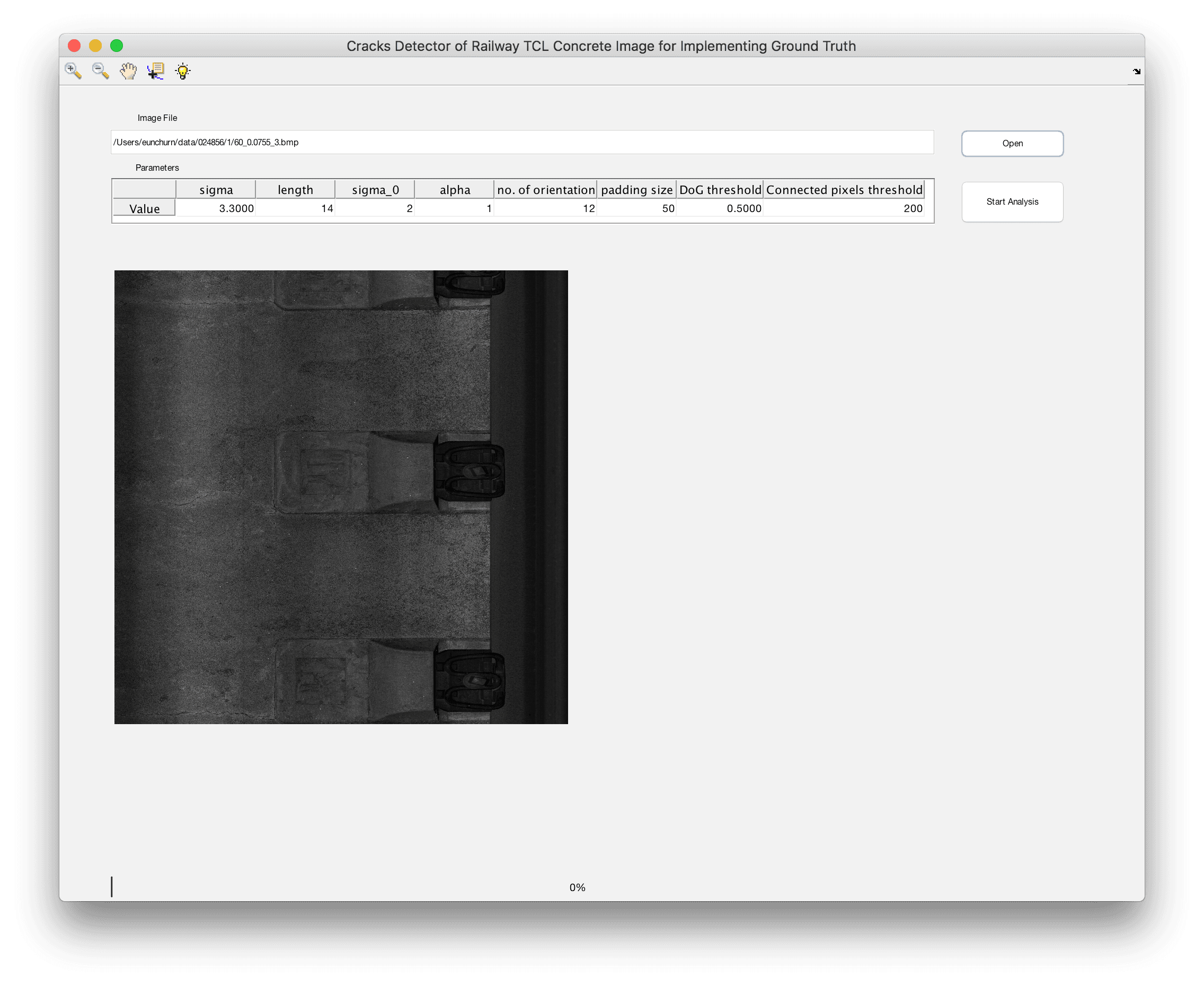
- 파라미터 설정 : 논문을 참고하여 DoG (Difference of Gaussian)의 파라미터와, 이진화 임계값(threshold)과 픽셀 연결 임계값을 설정한다. 기본설정은 아래표와 같다.
| sigma | length | sigma_0 | alpha | no. of orientation | padding size | DoG threshold | Connected pixels threshold |
|---|---|---|---|---|---|---|---|
| 3.3 | 14 | 2 | 1 | 12 | 50 | 0.5 | 200 |
- 분석 시작 : Start Analysis 를 클릭하여 분석을 수행한다. (화면 하단에서 분석 진행상황이 표시 된다.)
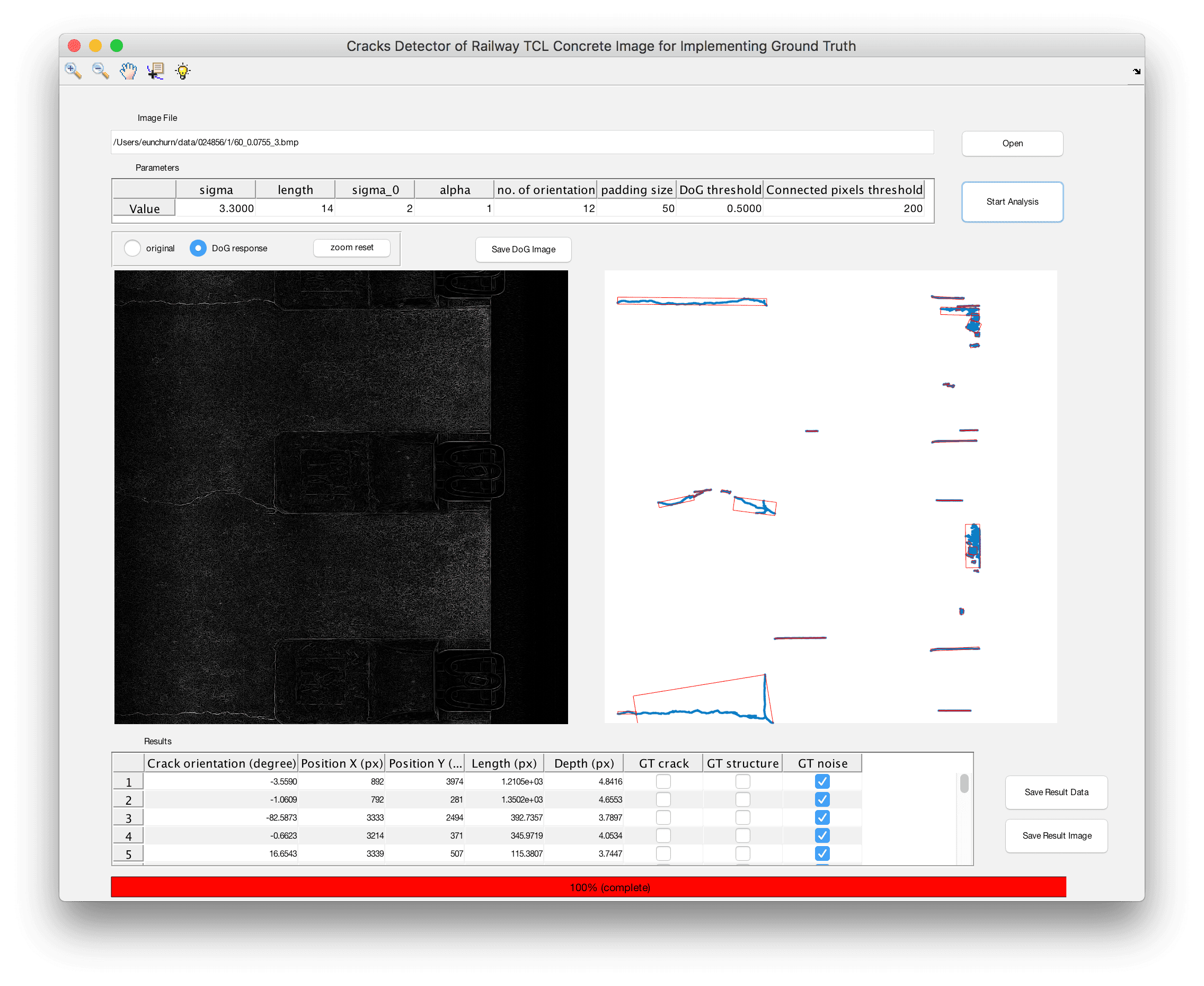
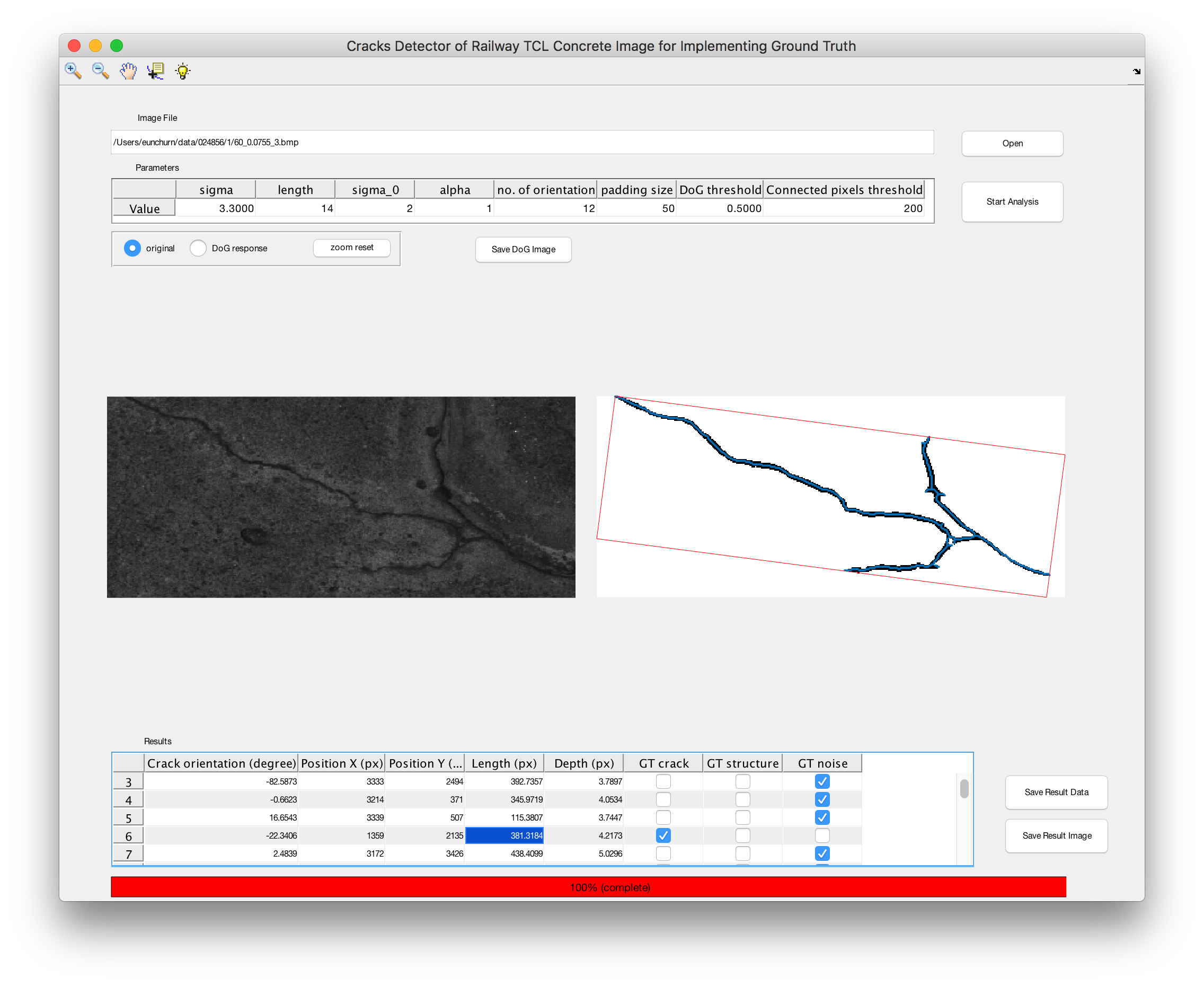
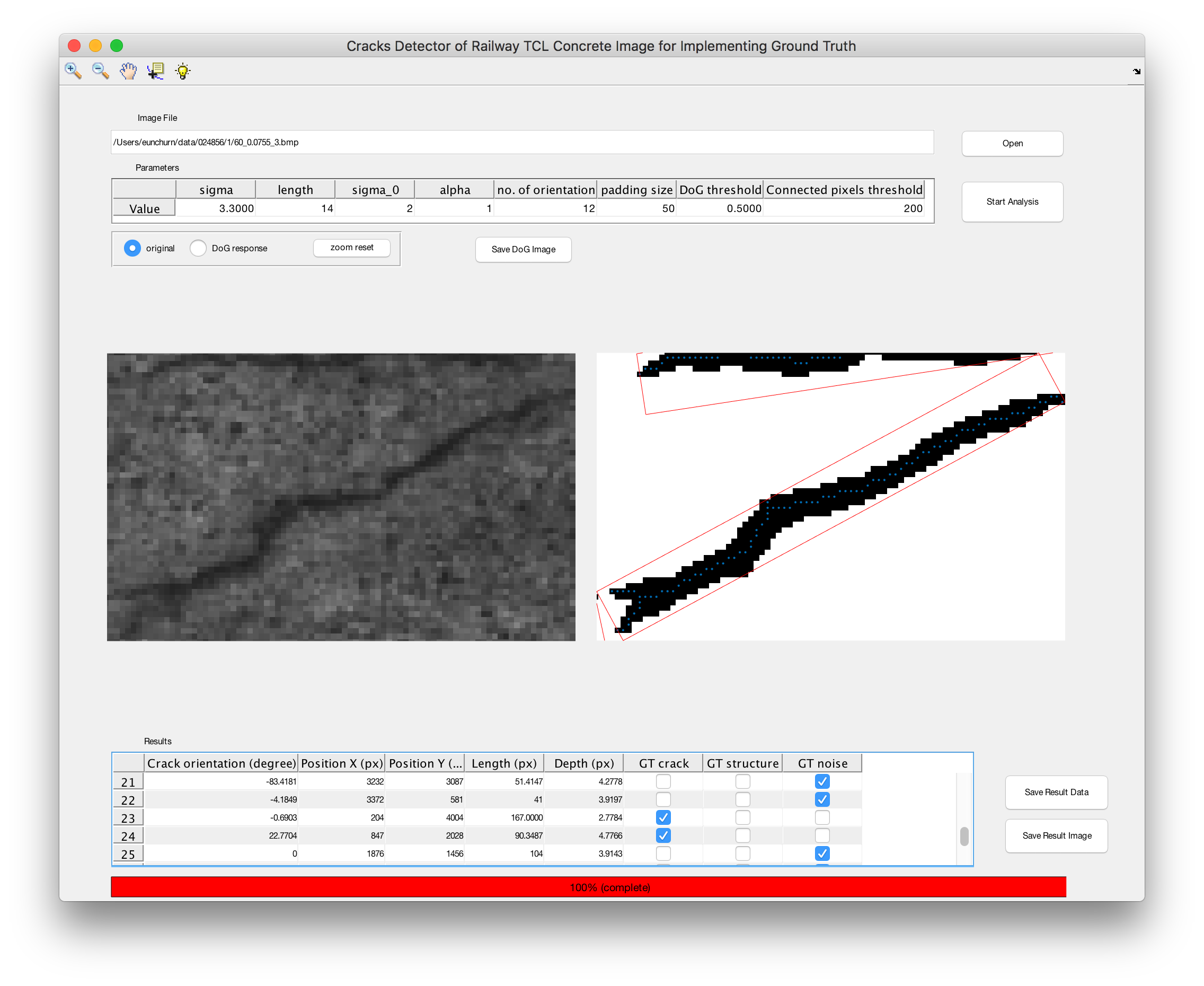
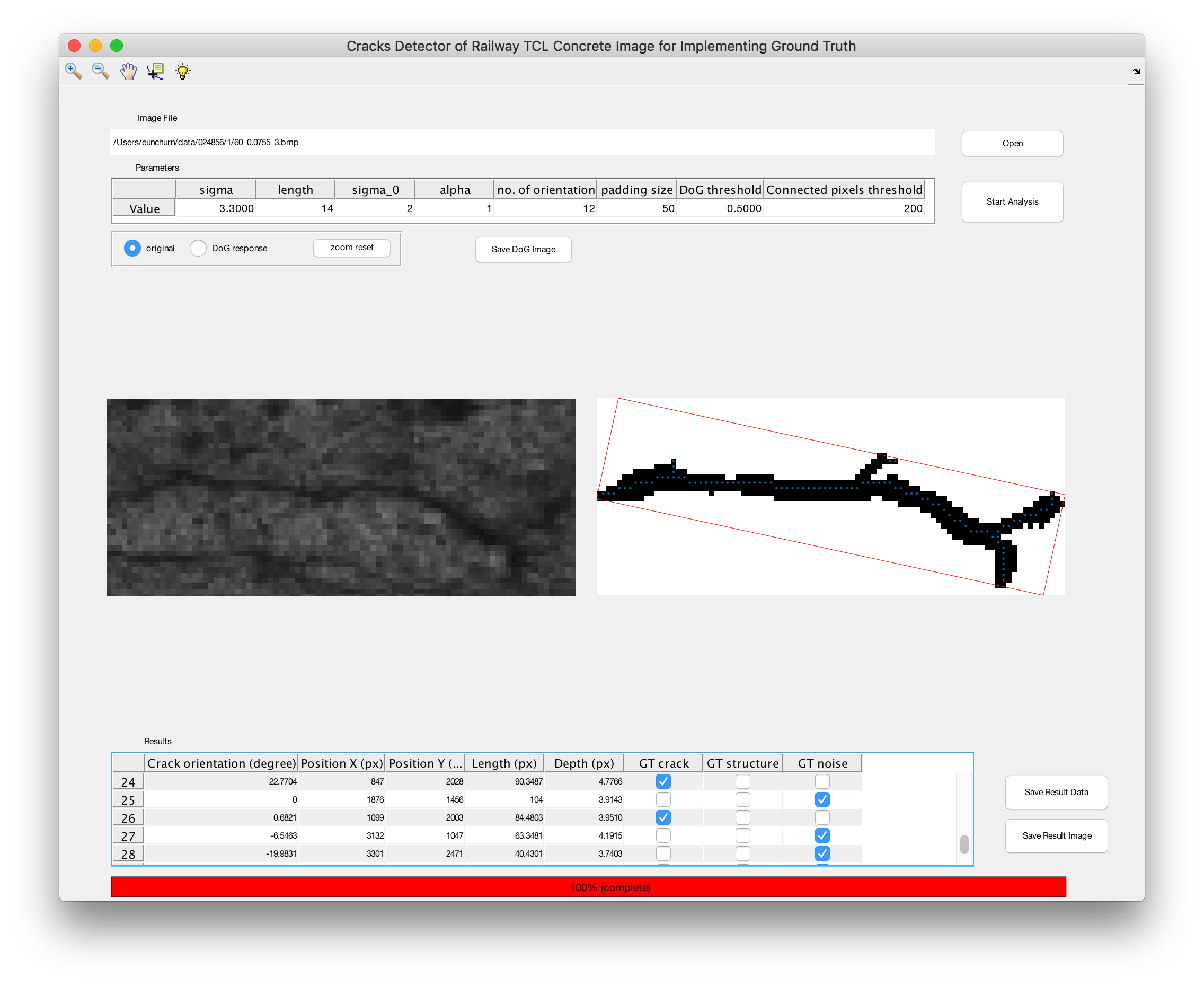
- 분석 완료 : 분석이 완료되면 이미지의 왼쪽은 DoG 응답 결과와 오른쪽 균열 분석결과가 표시 된다. 그리고 이미지의 아래쪽엔 균열 분석한 결과가 스프에드시트 형태로 표시된다.
- zoom tool 을 이용하여 분석결과를 zoom-in zoom-out하여 결과를 확인할 수 있다. (확대툴을 사용하여 마우스를 이미지위에서 드래그하면, 관심 영역이 확대 됨, 마우스를 더블클릭하면 zoom out 됨)
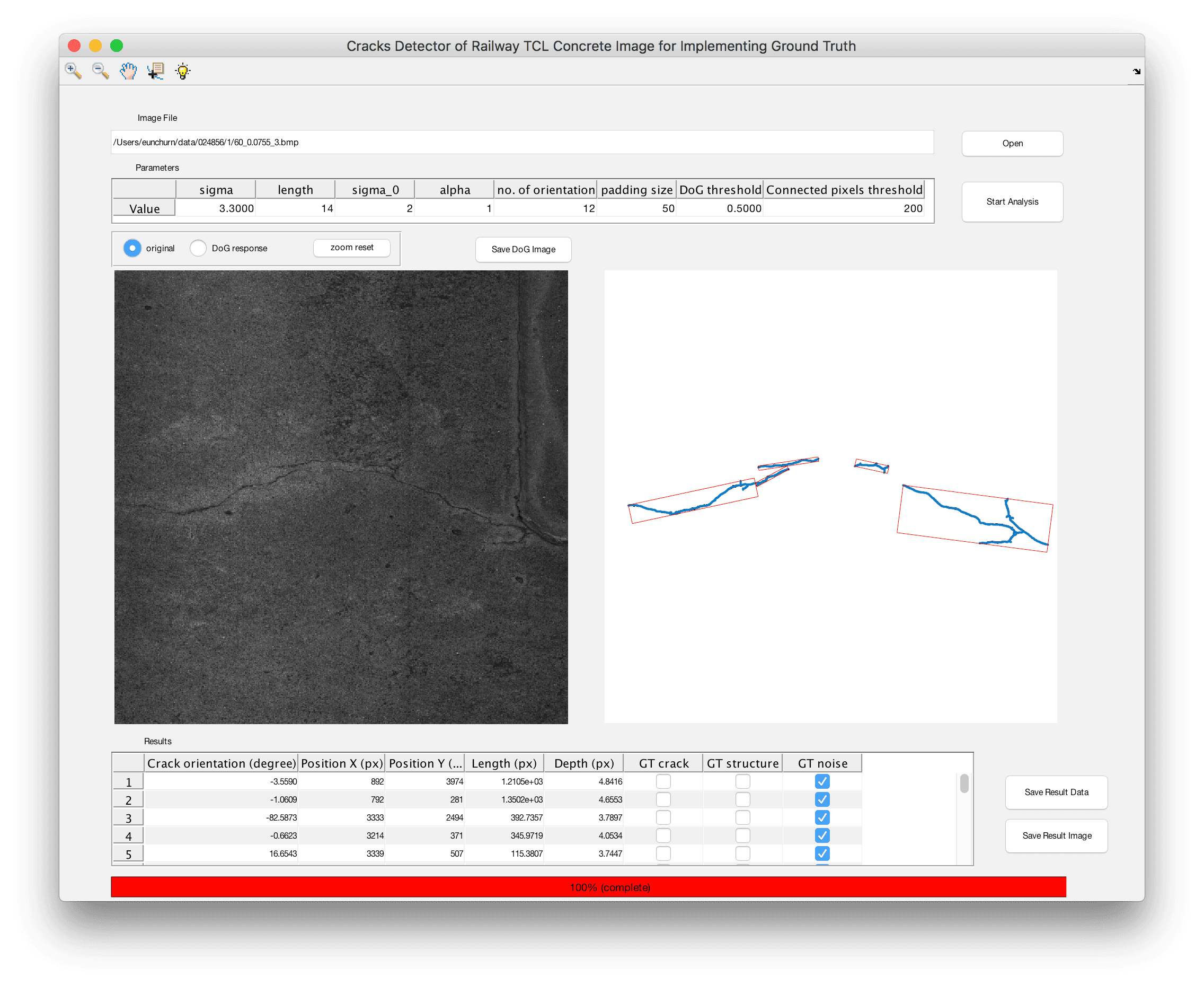
- 좌측이미지 상단의 Radio버튼에서 original 과 DoG response를 선택하여 원본이미지와 DoG 응답결과를 함께 확인 할 수 있다. (단, 이미지 변경 후 마우스 더블클릭으로 zoom out이 되지 않으니 zoom reset 버튼을 사용)
| original image | DoG response image |
|---|---|
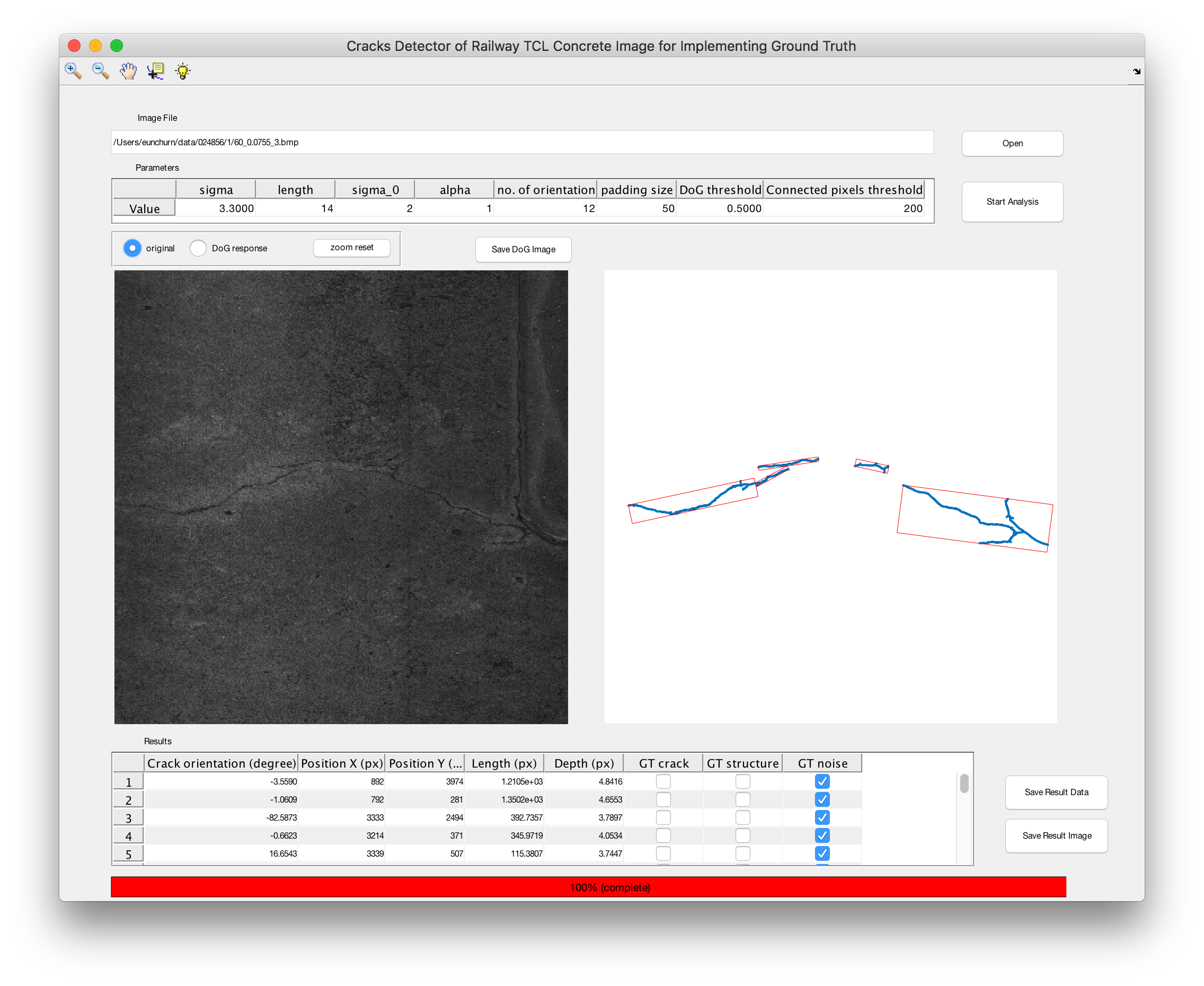 | 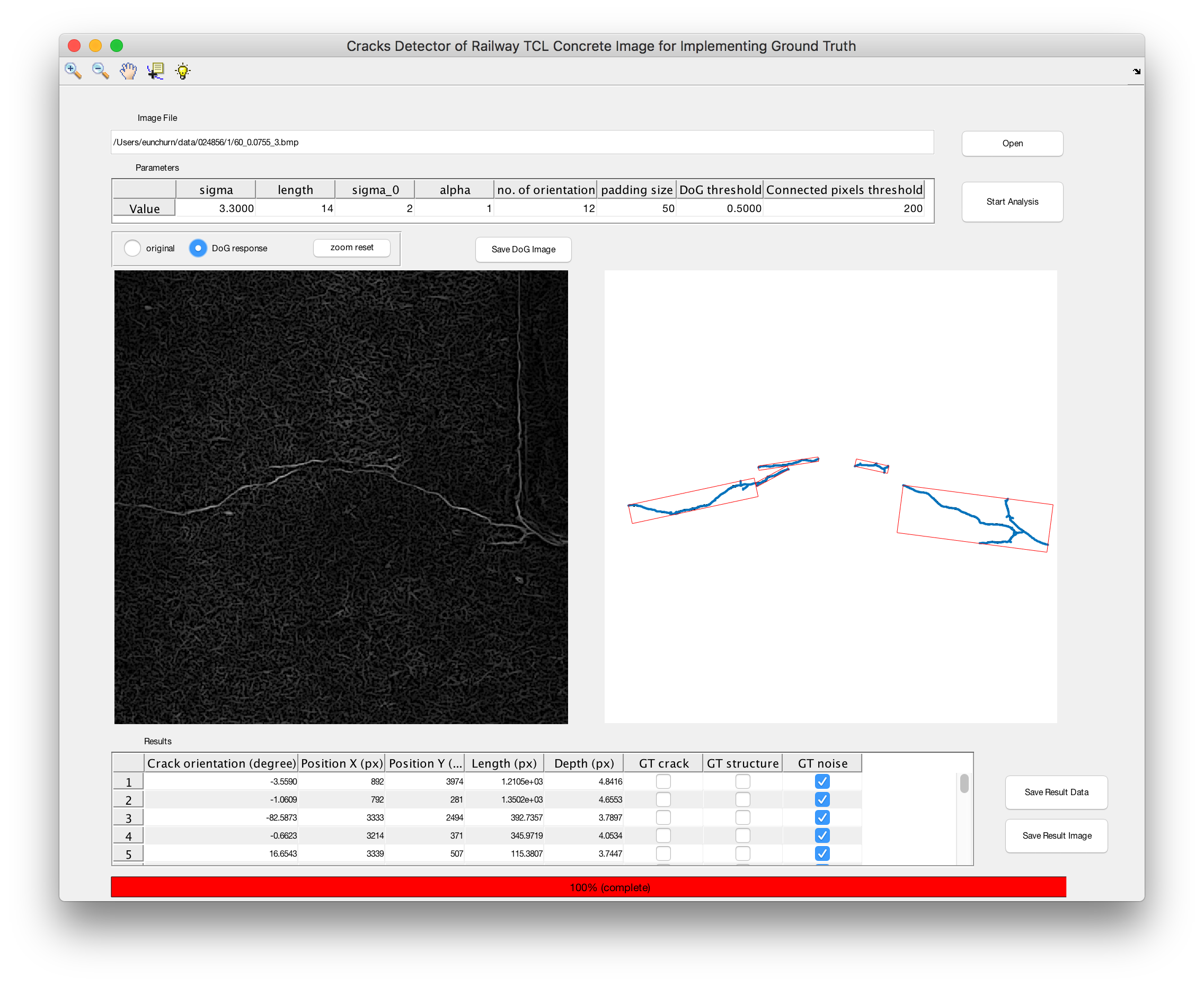 |
- 균열 Result 테이블은 행방향으로 순서대로 검출된 균열의 크기가 큰 균열부터 정렬이 되어있다. 첫번째 열부터

- 균열의 orientation : 진행방향을 기준으로 가로방향에서 균열의 방향을 각도(degree)로 표현한다.
- 균열 위치 X : MER(Minimum Enclosing Rectangle)결과에서 균열의 중심좌표의 X축 좌표를 표시한다. (현재는 pixel 단위)
- 균열 위치 Y : MER(Minimum Enclosing Rectangle)결과에서 균열의 중심좌표의 Y축 좌표를 표시한다. (현재는 pixel 단위)
- 균열 길이 : MER(Minimum Enclosing Rectangle)결과에서 균열의 가장 긴변 축의 길이를 표시한다. (현재는 pixel 단위)
- 균열 폭 : Thinning 결과와 이진화 결과를 비교하여 평균 균열 폭을 표시한다. (현재는 pixel 단위)
- 실측 균열 : 이 균열이 육안으로 확인했을 때 실제로 균열으로 판단될 때 체크 (ground truth)
- 실측 구조물 : 이 균열이 육안으로 확인했을 때 도상의 구조물을 판단될 때 체크 (ground truth)
- 실측 노이즈 : 이 균열이 육안으로 확인했을 때 노이즈로 판단될 때 체크 (ground truth)
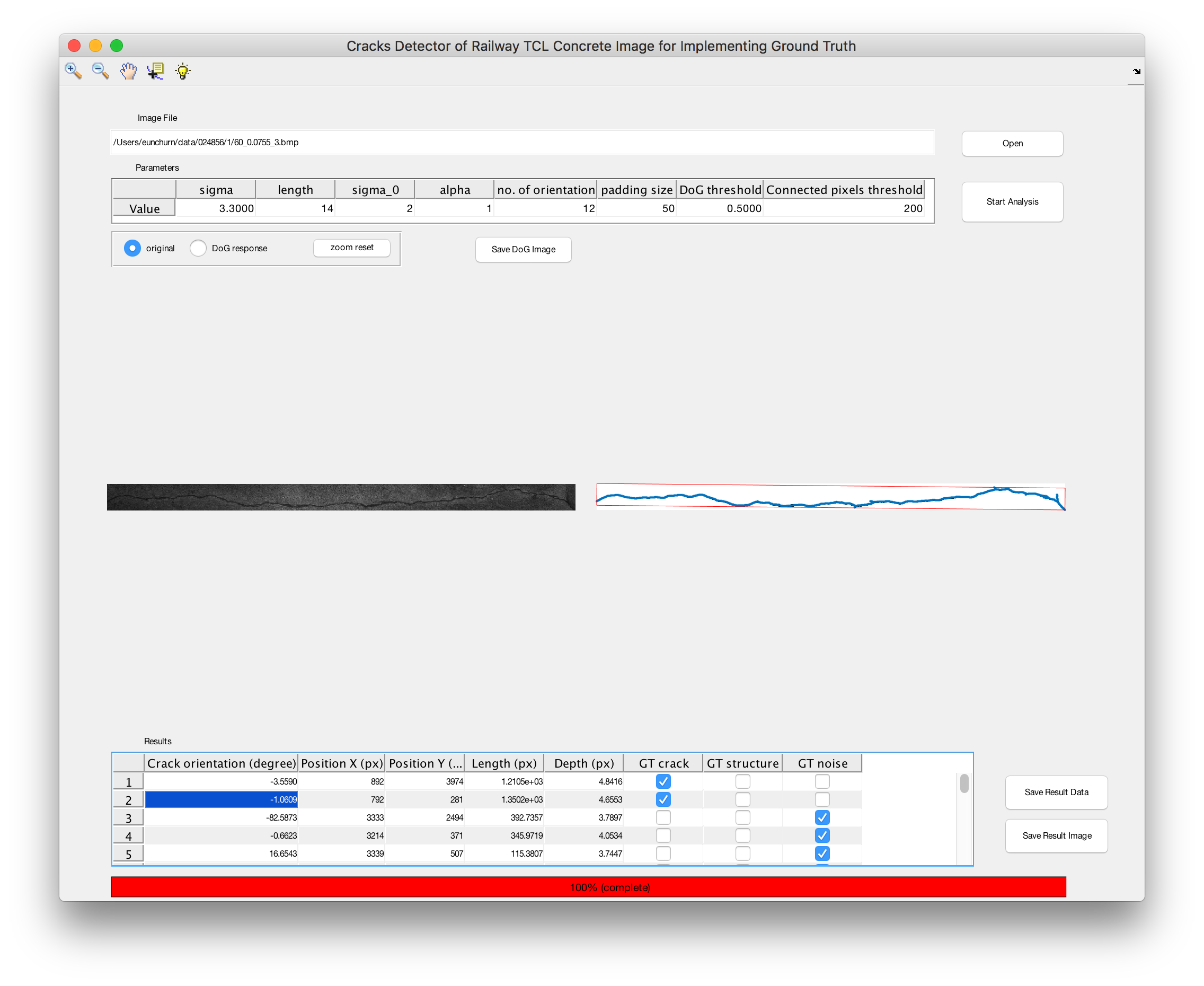
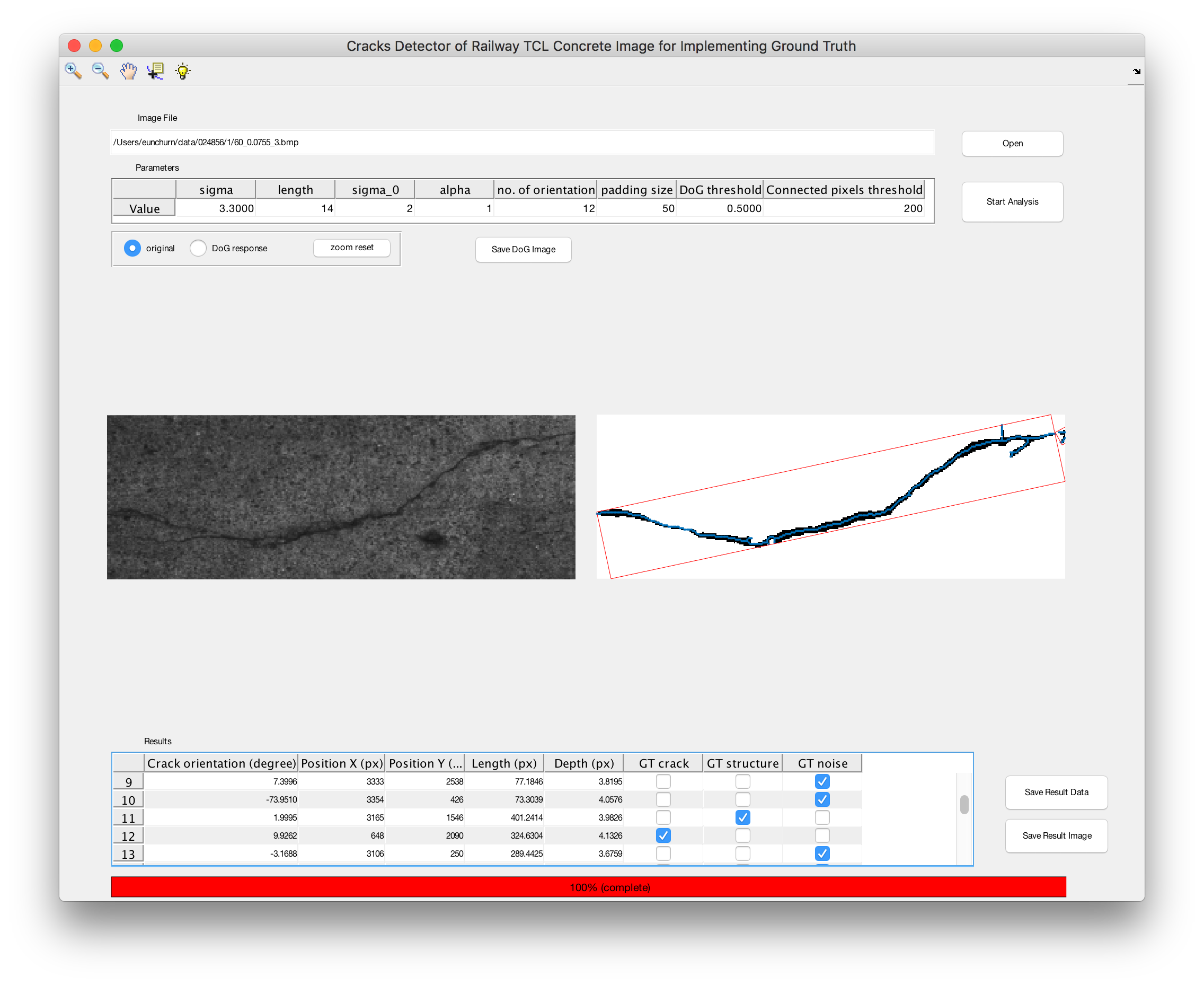
균열 검측 결과는 마우스로 셀을 선택할 때 마다 균열만 zoom in 해서 보여준다. 이를 해제 하기 위한 방법은 zoom reset 버튼을 클릭하면 전체 이미지 화면을 볼 수 있다. 차례대로 균열을 ground truth로 선택하며 실측과정을 수행한다.
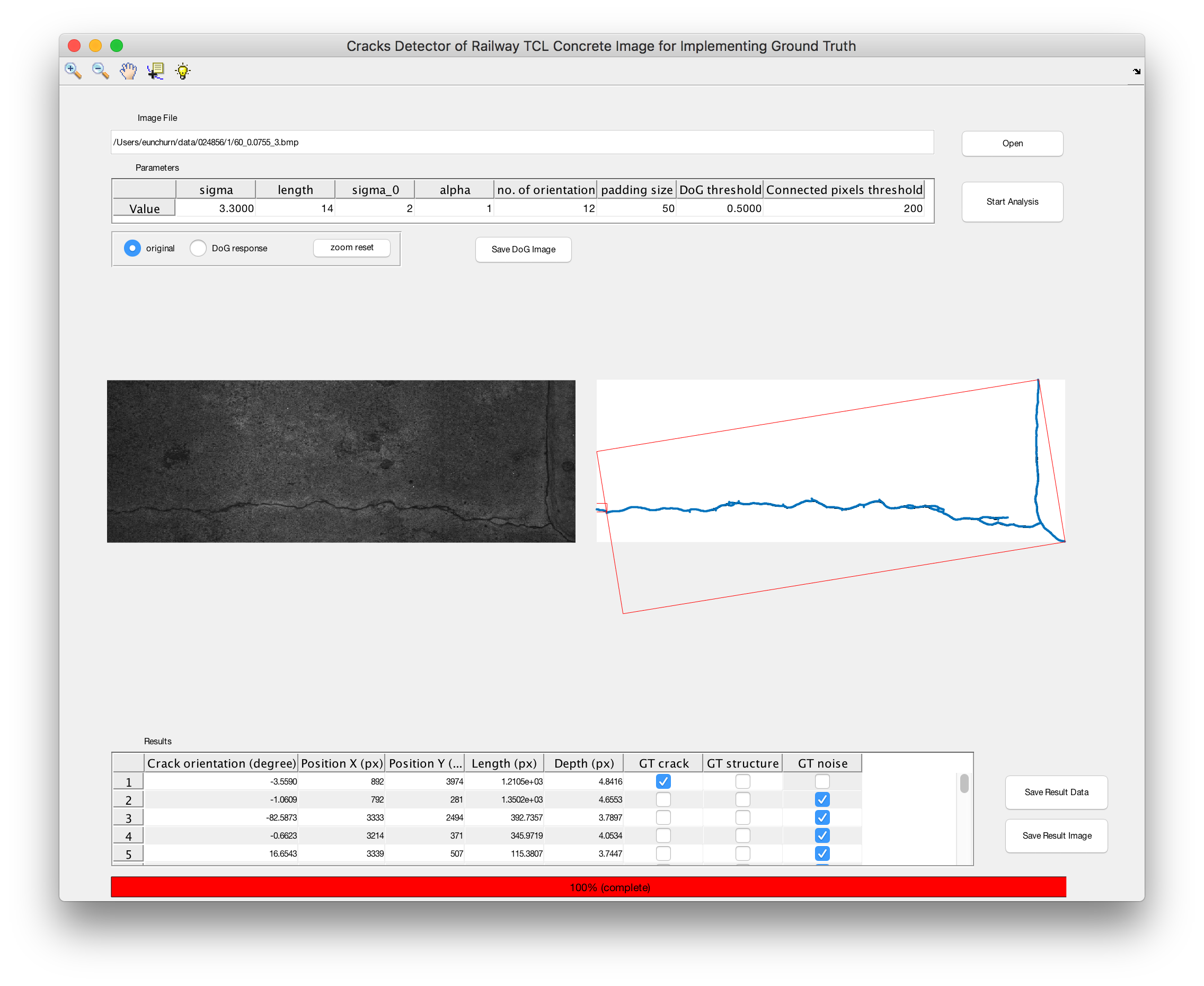 |  |
|---|---|
 |  |
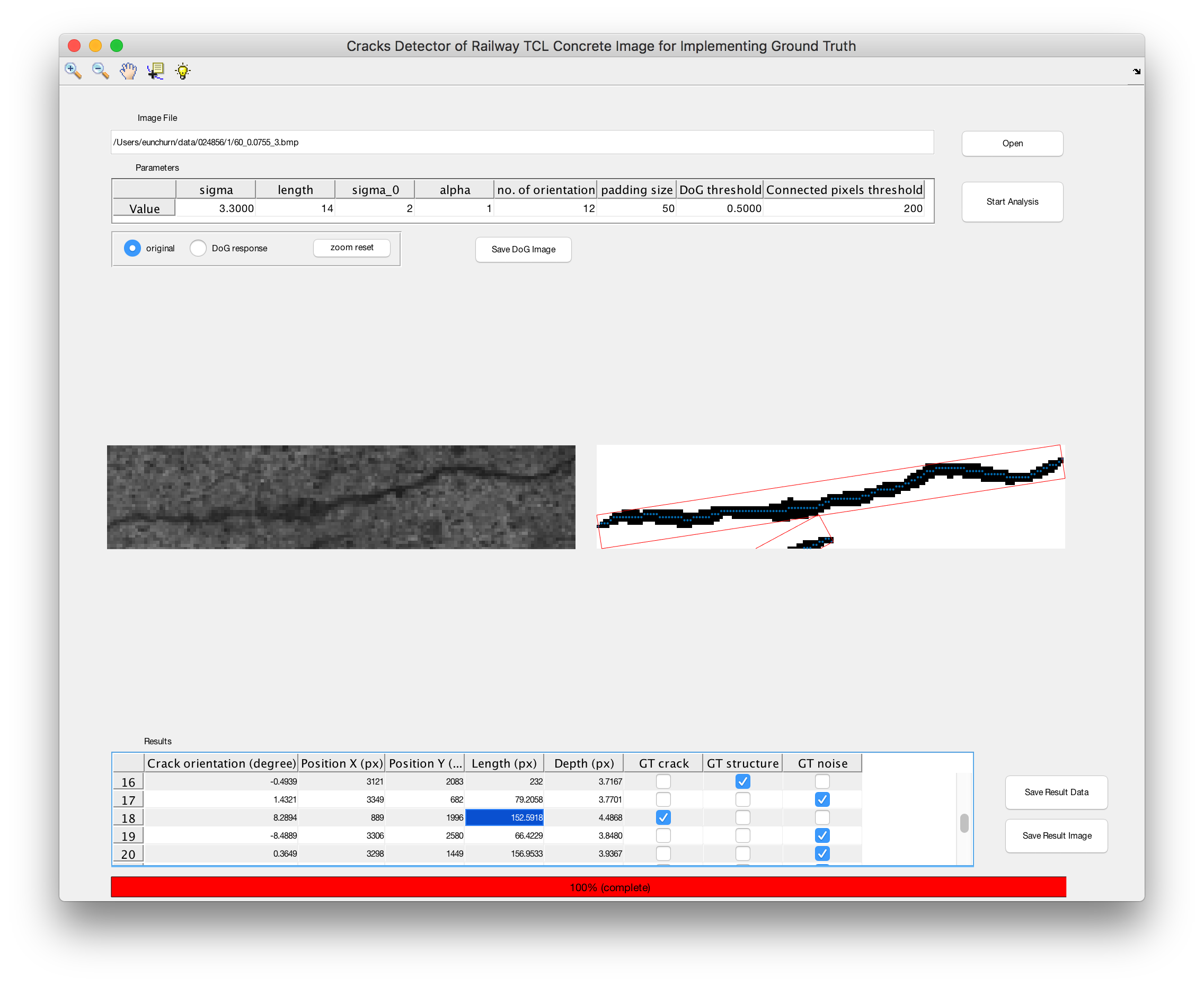 | 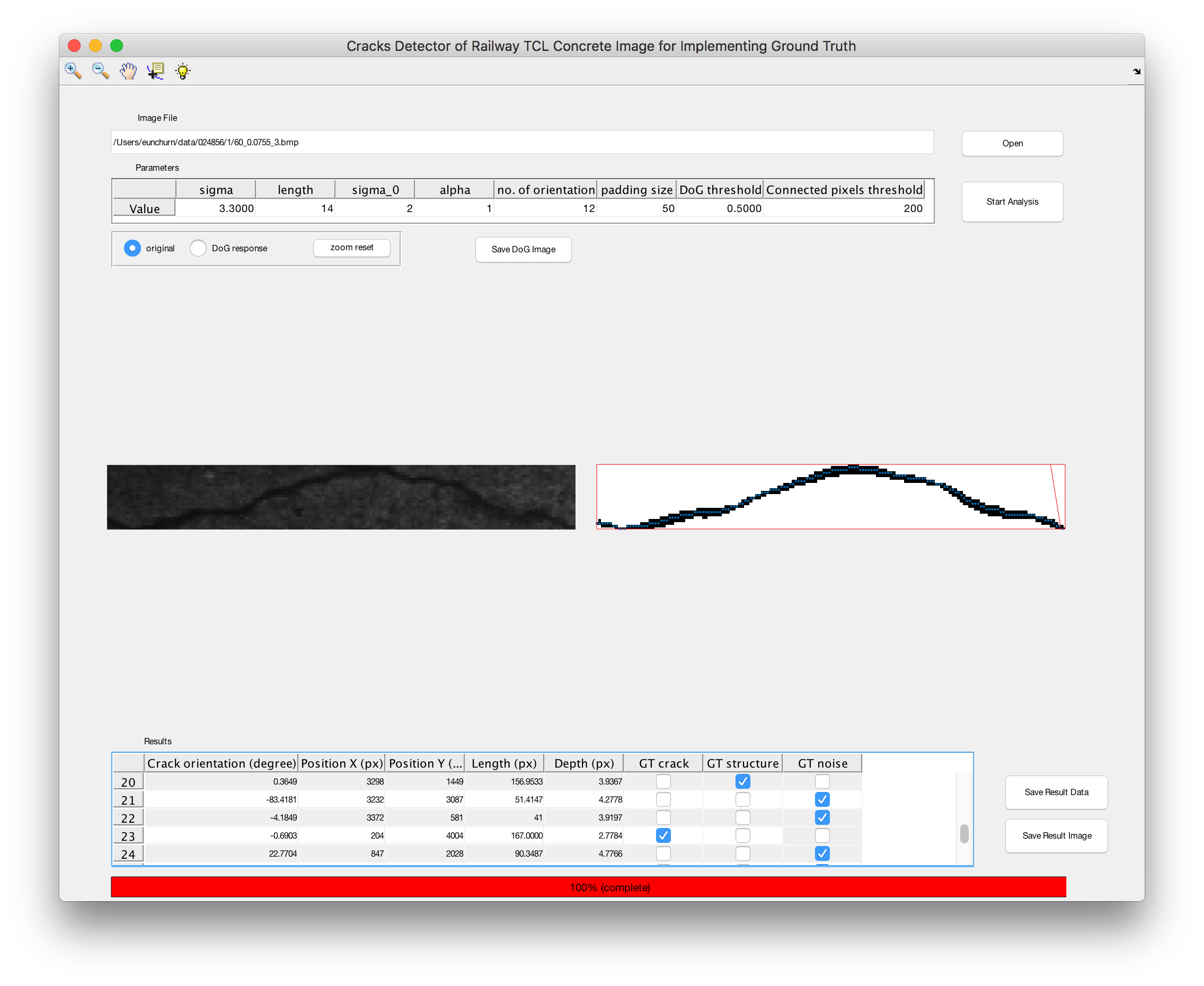 |
 |  |
- 결과 저장 : 균열의 ground truth 결과는 csv(comma separated value)파일로 저장할 수 있다. 또한 DoG 응답 결과와 ground truth에서 균열만 탐색한 결과를 이미지 파일로 저장할 수 있다.
Ground Truth Result (example)
- 테스트 이미지로 분석한 콘크리트 균열의 실측자료
- Ground truth (binary image 결과) : 추후 CNN을 위한 실측자료로 활용
| Original Image | Ground Truth (Cracks) |
|---|---|
 | 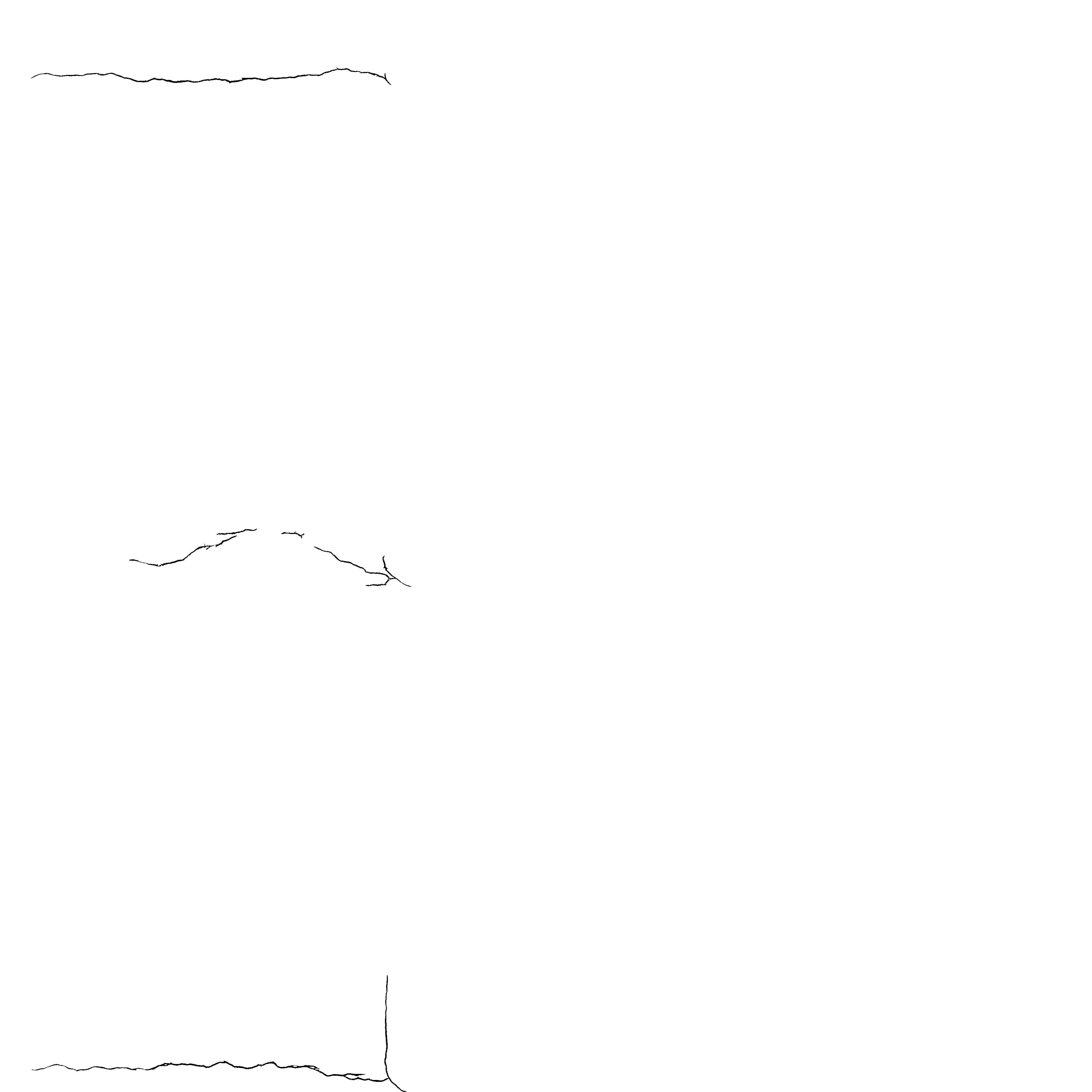 |
Version History
- v1.0 한 개의 이미지를 분석함
- v1.0.1 Parameter 오류 수정
- v1.0.1 균열 결과 default로 노이즈 선택 (효율적인 ground truth를 위함)
추후 개발 사항
- 배치 프로세스 : ground truth 하기전에 분석시간이 조금 걸리기 때문에 배치 분석을 하고 결과 파일을 로딩하여 GT를 수행할 수 있도록 개선 필요
- GT결과를 바탕으로 crack, structure, noise를 blob을 다른 색상으로 표시할 수 있도록 개선
- 분석결과 서버 DB에 결과를 저장할 수 있도록 개선
- 다양한 UI 개선 등